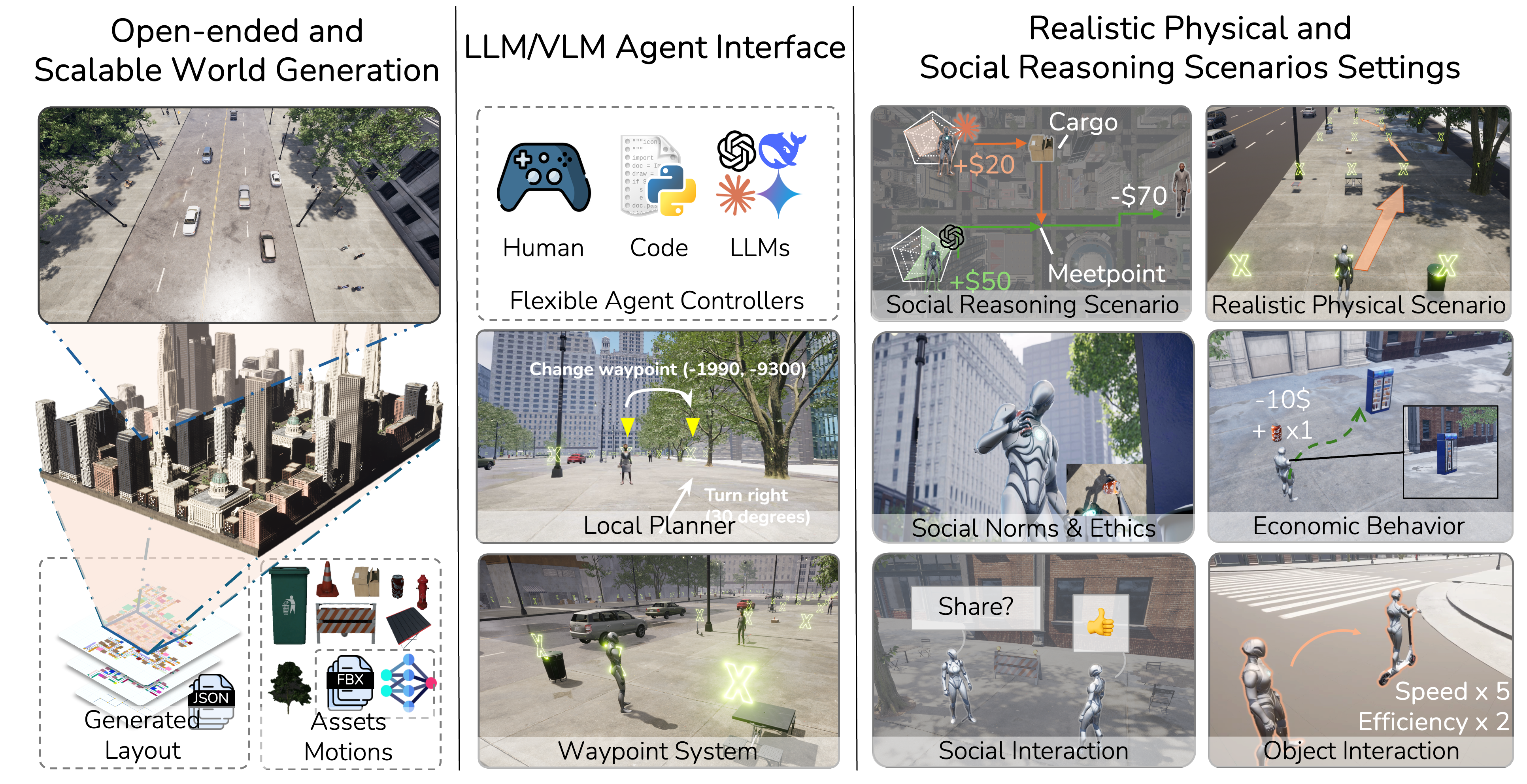
We introduce SimWorld, a new simulator built on Unreal Engine 5, designed for developing and evaluating LLM/VLM agents in rich, real-world-like settings.
🌍 Realistic World Simulation
Accurate physical and social dynamics with language-driven procedural environment generation
🤖 Rich Agent Interface
Multi-modal world inputs/feedback and open-vocabulary action outputs at varying abstraction levels
🎯 Diverse Scenarios
Physical and social reasoning scenarios that are easily customizable by users
Why SimWorld?
Large language models excel in structured domains but struggle in real-world conditions. SimWorld bridges this gap with unprecedented realism and flexibility.
Current Limitations
- ❌ Game-like environments lack realism
- ❌ Domain-specific simulators are too narrow
- ❌ Limited natural language interfaces
- ❌ Focus only on indoor scenes
SimWorld Solutions
- ✅ Photorealistic Unreal Engine 5 graphics
- ✅ Open-ended, procedural world generation
- ✅ Full language-driven control
- ✅ City-scale environments
| Simulator | Open-ended / Procedural | Open-ended / Lang-Ctrl | Physical / Social Realism | Action / Abstraction | Action / Open-Vocab | Agent Type | Physics Engine |
|---|---|---|---|---|---|---|---|
| Minedojo | ✅ | ❌ | ⭐️ | Low-level | ❌ | Humanoid | Minecraft |
| Mindcraft | ✅ | ❌ | ⭐️ | High-level | ❌ | Humanoid | Minecraft |
| MetaUrban | ✅ | ❌ | ⭐️⭐️ | Low-level | ❌ | Vehicle | PyBullet |
| EmbodiedCity | ❌ | ❌ | ⭐️⭐️⭐️ | Low-level | ❌ | Drone/Vehicle | Unreal Engine |
| CARLA | ❌ | ❌ | ⭐️⭐️⭐️ | Low-level | ❌ | Vehicle | UE / Unity |
| GRUtopia | ❌ | ❌ | ⭐️⭐️ | Low-level | ❌ | Humanoid/Robot | Isaac Sim |
| OmniGibson | ❌ | ❌ | ⭐️⭐️ | High-/Low-level | ❌ | Robot | Omniverse |
| AI2-THOR | ✅ | ❌ | ⭐️⭐️ | Low-level | ❌ | Robot | Unity |
| Habitat 3.0 | ❌ | ❌ | ⭐️⭐️ | Low-level | ❌ | Humanoid/Robot | Bullet |
| SimWorld | ✅ | ✅ | ⭐️⭐️⭐️ | High-/Low-level | ✅ | Humanoid/Robot/Vehicle | Unreal Engine |
🌍 Infinite World Generation
SimWorld generates infinite worlds with diverse shapes, scales, and distributions using procedural generation. Users can easily control and edit the world layout through both code and a user-friendly UI.
🏙️ Various and Dynamic Simulated Scenes
Control environmental factors on the fly - change weather, time of day, and object properties during runtime using the Python API.
🚦 Advanced Traffic System
Dynamic traffic system simulates real-world traffic flow and pedestrian behavior with both rule-based and LLM-driven control mechanisms.
🤖 Various Agent Actions
Support for navigation, social behavior, object manipulation, and environment interaction through Python API.
👥 Social Reasoning Simulation
Define social reasoning tasks, generate corresponding scenarios, and evaluate agent capabilities in social contexts.
⚙️ Physical Reasoning Simulation
Embodied reasoning with multimodal perception and real-time decision-making under uncertainties.
📚 Citation
@misc{simworld,
title={SimWorld: An Open-ended Realistic Simulator for Autonomous Agents in Physical and Social Worlds},
author={Zhuang*, Yan and Ren*, Jiawei and Ye*, Xiaokang and He, Xuhong and Gao, Zijun and Wu, Ryan and Dogra, Mrinaal and Zhang, Cassie and Kim, Kai and Wolfinger, Bertt and Ma, Ziqiao and Shu$^{\dagger}$, Tianmin and Hu$^{\dagger}$, Zhiting and Qin$^{\dagger}$, Lianhui},
booktitle={Preprint(Under Review)},
year={2025}
}